







The manufacturing industry offers diverse career paths, including:
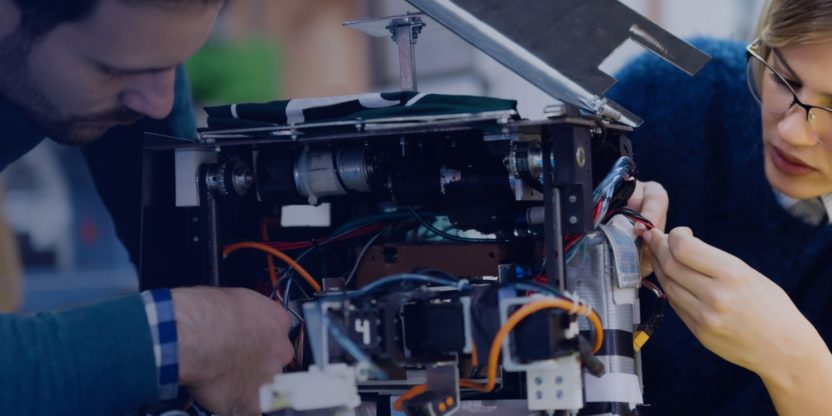
- Manufacturing engineer: responsible for maintaining and improving the efficiency and quality of the production processes to produce a better product.
- Robotics technician: responsible for configuring, testing, operating, maintaining, and troubleshooting robots, as well as other automated systems used in production.
- 3D printing technician: producing physical 3D representations of computer-generated models.
- Product lifecycle management (PLM): responsible for overseeing the entire lifecycle of a product from its inception through the engineering, design and manufacture.
- Engineering construction technician: supports engineers to design, test, install, maintain, repair and decommission industrial facilities.
These are just a few examples, and the industry continues to evolve with opportunities for those passionate about sustainability and manufacturing.